Manufacturing production line

Sheet metal automation process
- Implementation of U-Bender process unmanned automation in product input
- Efficient use of space in the take-out process by applying a multi-joint robot

Automated foaming process
- Establishment of foaming automation through individual fixture utilization
- Automatic control system through barcode reading
Injection Process

Status of injection molding machines
| Division | 3300t | 2700t | 2700t | 2300t |
| Catapult | LS-The ONE | LS-The ONE | LS-The ONE | LS-The ONE |
| Take-out method | Multi-joint Robot | |||

Raw Material Supply Division
- Establishment of Raw Material Auto Feeding System and Monitoring System
PRESS Fair

PRESS automated process (300t)
- Transfer and take-out using multi-joint robot

PRESS automated process (600t)
- Transferring and taking out parts using an articulated robot
- Establishment of automatic mold changer
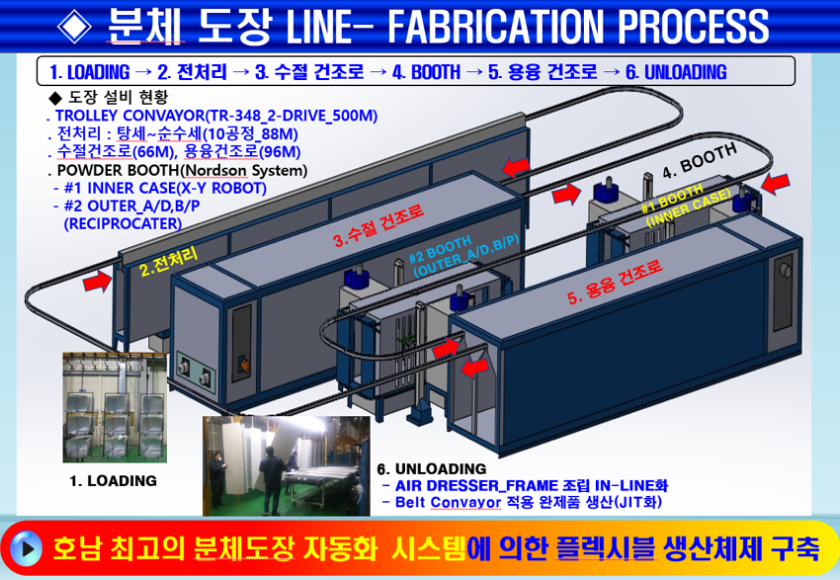
Powder coating automation process